
![]() &nb sp; (1)多波束天线的旋转轴z”由z轴旋转a角,得到旋转后的z’轴,再将z’轴平移距离R得到。在x”o’z”坐标系下,多波束天线的数学方程为标准抛物线绕z”轴旋转后所得到的表面方程。
&nb sp; (1)多波束天线的旋转轴z”由z轴旋转a角,得到旋转后的z’轴,再将z’轴平移距离R得到。在x”o’z”坐标系下,多波束天线的数学方程为标准抛物线绕z”轴旋转后所得到的表面方程。 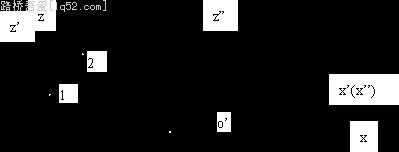
o F
图 1 将z轴旋转a角后,xoz和x’oz’坐标系的转换公式为:
![]() &nb sp; (2) z’轴平移到z”的平移量为R,故有:
&nb sp; (2) z’轴平移到z”的平移量为R,故有:
![]() &nb sp; (3)因此在xoz与x”o’z”坐标系的转换关系为:
&nb sp; (3)因此在xoz与x”o’z”坐标系的转换关系为:
![]() &nb sp; (4)选取另一坐标轴y” 与x”o’z”平面垂直,且构成右手坐标系,故标准抛物线绕z”轴旋转后得到的方程为:
&nb sp; (4)选取另一坐标轴y” 与x”o’z”平面垂直,且构成右手坐标系,故标准抛物线绕z”轴旋转后得到的方程为:
![]() (5)实际上,多波束天线是标准抛物线中的某一段(如图1中1~2弧段)绕z”轴旋转后所截取的一部分曲面。 由坐标系转换求出测量点在设计坐标系中的坐标后,即可求出该点的轴向误差和法向误差,其中 法向误差对应的就是调整量[3]。 3. 极坐标工业测量系统的应用 3.1 系统的建立极坐标工业测量系统STM的建立极为简单,只需要一台仪器即可。在工作中,我们采用TC2002全站仪、笔记本电脑、工业测量系统软件平台Axyz-CDM/STM和联机电缆等构成系统。只 需将仪器整置在附有强制对中装置的固定观测墩上,就可以进行坐标测量了。与经纬仪工业测量系统相比较,STM省略了定向过程,也就减少了由系统定向带来的误差。根据文献[4]的结论:在近距离测距 时,TC2002的乘常数可以忽略,而用交会测量结果现场修正TC2002的加常数,那么修正后的STM空间定位精度可达到±0.5mm。因此用单台全站仪测量时,须测出反射片的加常数修正值,我们在现场测量得到反射片的加常数为33.0mm(其标称值为34.4mm)。观测点的选择与天线的调整机构相联系。首先在天线面上选取十个点,这些点位分布良好,基本上能代表整个曲面,而且 每点都有已知的设计坐标。 3.2坐标系转换为了确定测量坐标系与设计坐标系间的转换参数,我们将反射片标志贴在设计点上,用全站仪极坐标测量系统测出这十个 点在测量坐标系中的坐标,然后与其设计坐标作转换,求得转换参数,如此可确定测量坐标系和天线设计坐标系(O-X²Y²Z²)之间的关系。转换参数求取后,可以将其它测量点全部转换到设计坐标系中,从而计算各个调整点的调整量,并且评定 天线的面型误差。在实际测量时,我们对多波束天线在不同状态下进行了测量和坐标转换。结果见表1、2。
(5)实际上,多波束天线是标准抛物线中的某一段(如图1中1~2弧段)绕z”轴旋转后所截取的一部分曲面。 由坐标系转换求出测量点在设计坐标系中的坐标后,即可求出该点的轴向误差和法向误差,其中 法向误差对应的就是调整量[3]。 3. 极坐标工业测量系统的应用 3.1 系统的建立极坐标工业测量系统STM的建立极为简单,只需要一台仪器即可。在工作中,我们采用TC2002全站仪、笔记本电脑、工业测量系统软件平台Axyz-CDM/STM和联机电缆等构成系统。只 需将仪器整置在附有强制对中装置的固定观测墩上,就可以进行坐标测量了。与经纬仪工业测量系统相比较,STM省略了定向过程,也就减少了由系统定向带来的误差。根据文献[4]的结论:在近距离测距 时,TC2002的乘常数可以忽略,而用交会测量结果现场修正TC2002的加常数,那么修正后的STM空间定位精度可达到±0.5mm。因此用单台全站仪测量时,须测出反射片的加常数修正值,我们在现场测量得到反射片的加常数为33.0mm(其标称值为34.4mm)。观测点的选择与天线的调整机构相联系。首先在天线面上选取十个点,这些点位分布良好,基本上能代表整个曲面,而且 每点都有已知的设计坐标。 3.2坐标系转换为了确定测量坐标系与设计坐标系间的转换参数,我们将反射片标志贴在设计点上,用全站仪极坐标测量系统测出这十个 点在测量坐标系中的坐标,然后与其设计坐标作转换,求得转换参数,如此可确定测量坐标系和天线设计坐标系(O-X²Y²Z²)之间的关系。转换参数求取后,可以将其它测量点全部转换到设计坐标系中,从而计算各个调整点的调整量,并且评定 天线的面型误差。在实际测量时,我们对多波束天线在不同状态下进行了测量和坐标转换。结果见表1、2。
表1 天线支架水平时的坐标精度
|
加尺度因子改正 |
不加尺度因子改正 | |||||||
|
点号 |
DX |
DY |
DZ |
点位精度 |
DX |
DY |
DZ |
点位精度 |
|
p2 |
0.027 |
-0.443 |
-0.165 |
0.474 |
0.812 |
-0.134 |
-0.866 |
1.195 |
|
p19 |
-0.237 |
-0.201 |
-0.386 |
0.496 |
-1.038 |
0.109 |
-1.089 |
1.508 |
|
p75 |
-0.182 |
-0.104 |
0.095 |
0.230 |
0.124 |
-0.111 |
-0.125 |
0.208 |
|
p81 |
0.056 |
0.310 |
0.347 |
0.469 |
-0.227 |
0.302 |
0.124 |
0.398 |
|
p94 |
-0.422 |
0.643 |
-0.315 |
0.831 |
0.435 |
0.657 |
-0.344 |
0.860 |
|
p111 |
0.643 |
0.599 |
-0.315 |
0.934 |
-0.235 |
0.600 |
-0.301 |
0.711 |
|
p123 |
0.178 |
-0.221 |
0.667 |
0.724 |
0.498 |
-0.373 |
0.876 |
1.074 |
|
p129 |
-0.143 |
0.428 |
0.739 |
0.866 |
-0.434 |
0.272 |
0.948 |
1.077 |
|
p186 |
0.394 |
-0.296 |
-0.258 |
0.556 |
1.301 |
-0.451 |
0.459 |
1.451 |
|
p203 |
-0.314 |
-0.715 |
-0.408 |
0.881 |
-1.236 |
-0.872 |
0.317 |
1.546 |
表2 天线支架倾斜(工作状态)时的坐标精度
|
加尺度因子改正 |
不加尺度因子改正 | |||||||
|
点号 |
DX |
DY |
DZ |
总体精度 |
DX |
DY |
DZ |
总体精度 |
|
p2 |
-0.119 |
-0.063 |
0.769 |
0.781 |
0.601 |
0.221 |
0.127 |
0.653 |
|
p19 |
0.393 |
0.372 |
0.757 |
0.931 |
-0.340 |
0.655 |
0.114 |
0.747 |
|
p75 |
0.516 |
-0.334 |
-0.243 |
0.661 |
0.797 |
-0.340 |
-0.444 |
0.973 |
|
p81 |
-0.116 |
-0.243 |
-0.119 |
0.294 |
-0.375 |
-0.250 |
-0.323 |
0.554 |
|
p94 |
-0.127 |
0.116 |
-0.132 |
0.217 |
0.658 |
0.129 |
-0.158 |
0.689 |
|
p111 |
-0.501 |
-1.015 |
-1.087 |
1.570 |
-1.306 |
-1.015 |
-1.073 |
1.972 |
|
p123 |
-0.158 |
0.125 |
0.200 |
0.284 |
0.135 |
-0.014 |
0.392 |
0.415 |
|
p129 |
-0.852 |
0.404 |
0.356 |
1.008 |
-1.119 |
0.262 |
0.547 |
1.273 |
|
p186 |
1.040 |
0.079 |
-0.561 |
1.185 |
1.871 |
-0.063 |
0.095 |
1.875 |
|
p203 |
-0.077 |
0.560 |
0.060 |
0.568 |
-0.922 |
0.416 |
0.724 |
1.244 |
表 3 各种状态下的坐标转换精度
|
支架状态 |
是否加尺度改正 |
转换精度 |
尺度因子 |
面型误差 |
|
水 平 |
是 |
0.68 |
0.99975798 |
0.88 |
|
否 |
1.09 | |||
|
倾斜(10个点) |
是 |
0.86 |
0.99977828 |
0.64 |
|
否 |
1.16 | |||
|
倾斜(155个点) |
是 |
1.02 |
0.99992701 |
1.06 |
|
否 |
1.04 |
 |
不同状态下,焦点在底板坐标系中的坐标如表4所示。
表4 焦点在底板坐标系中的放样值
|
状态 |
X |
Y |
Z |
|
1 |
362.219 |
154.111 |
420.179 |
|
2 |
357.813 |
155.380 |
422.242 |
